


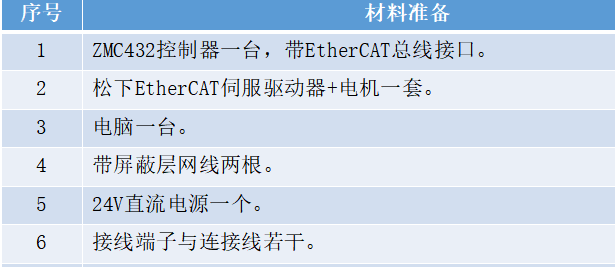
在工业自动化中,EtherCAT控制器与驱动器的联接与设置极为关键。操作失误可能引发连接故障或设备无法正常工作。下面,我将为大家详细介绍相关内容。
快速查看本机IP
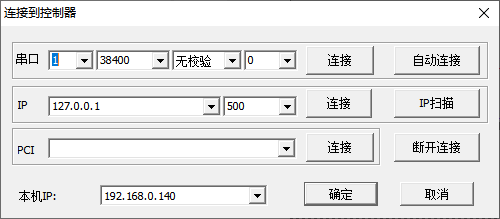
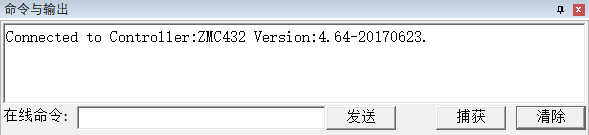
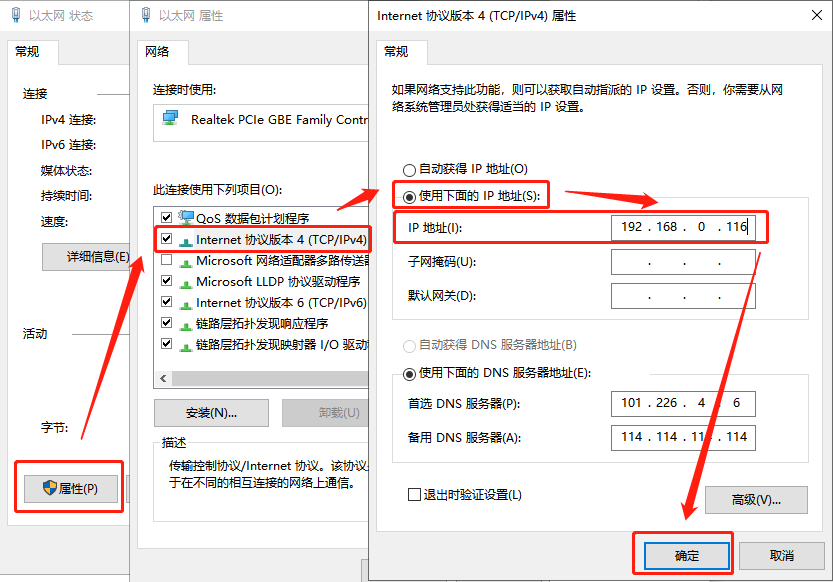
通过“连接到控制器”这个界面,可以迅速查看到本机的IP地址。将这个地址与控制器的IP进行对照,可以判断它们是否在同一网络范围内。比如,在深圳的一家工厂车间里,小李需要连接控制器时,就会利用这个界面来进行查看和比对。同时,要留意有线和无线网卡的IP配置,以防网络连接出现问题。
出厂时,控制器的默认IP地址通常是192.168.0.11。确认本机的IP地址后,对网卡IP进行设置至关重要。以上海某企业为例,小张因未正确调整网卡IP,导致无法顺利联网,经过调整后才恢复正常。
实现编程软件连接
选择恰当的IP地址,然后点击“连接到控制器”界面中的连接按钮。一旦编程软件与控制器顺利连接,系统会在在线命令和输出窗口显示相关信息。以北京某实验室为例,小王操作后,成功连接,屏幕上会显示“连接已建立”的提示。
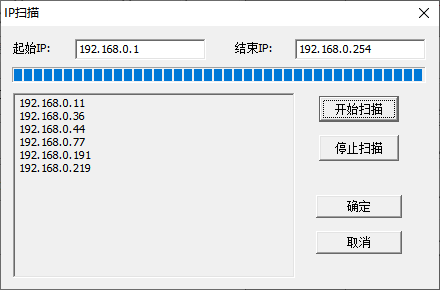

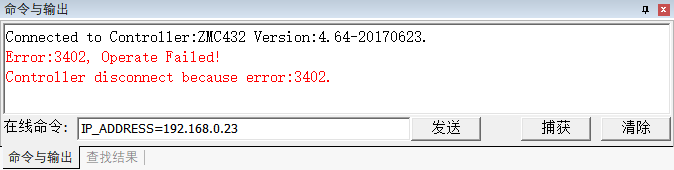
在连接之前,请检查IP地址是否准确无误。如果控制器和电脑不在同一个网络范围内,那么需要对设置进行修改。比如,广州的一家工厂,因为IP地址段不匹配,导致无法成功连接。经过调整后,它们就能正常连接了。
修改控制器IP地址
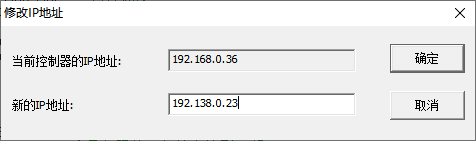
首先,需要通过串口连接来获取控制器的IP地址。接着,对本地或控制器的IP地址进行更改,确保它们在同一网络范围内。以江苏的一个车间为例,技术员小赵就是按照这种方式来调整控制器IP的。
在使用串口进行连接时,务必要确保连接的稳定性和通信顺畅。一旦发现数据线出现松动,就有可能无法正确获取控制器的IP地址。以浙江某工厂为例,就曾因为数据线的问题,导致IP地址获取失败的情况发生。
EtherCAT通讯周期
EtherCAT伺服驱动器能够适应多种通信周期,包括250微秒、500微秒、1毫秒、2毫秒、4毫秒等。当它接入系统时,会自动与控制器的周期相匹配,无需手动调整。在山东的一条自动化生产线中,驱动器在连接后便自动找到了合适的周期。
若通讯周期无法自动对齐,通信过程可能会受阻,此时可以通过更新控制器的软件来调整周期。比如,在天津的一个项目里,就是通过更新固件的方法,成功解决了周期不匹配的问题。

数据字典设置

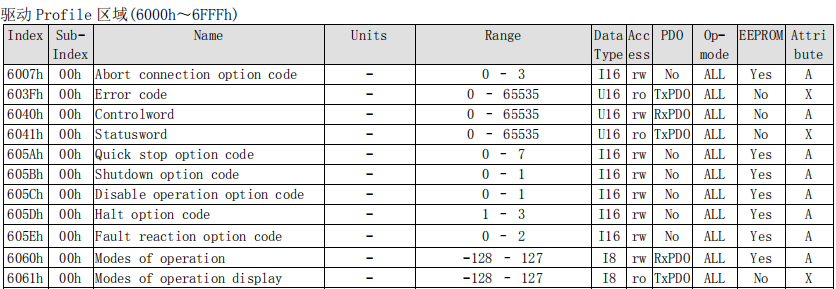
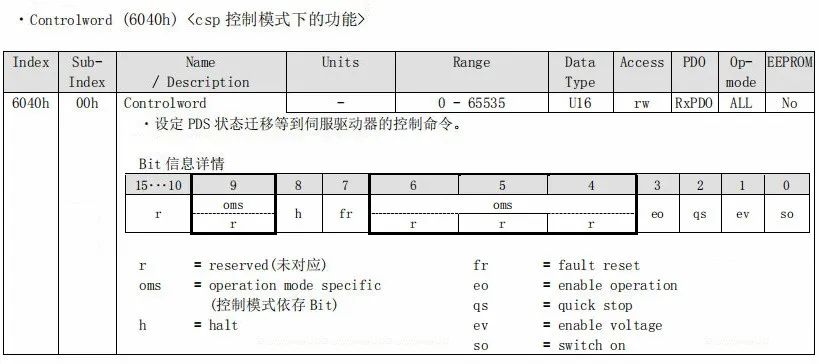
数据字典的编号和功能由协议来规定,用户只需根据说明来配置相应的bit位即可。所有遵循EtherCAT标准的设备都采用相同的数据字典。比如,在河北某工厂的设备配置中,就是按照这种方式进行的。

配置数据字典时,需认真检查每个bit位的作用,以防配置不当导致设备运作出现问题。例如,河南某企业就曾因配置失误,使得设备出现了故障。
驱动器参数修改与IO映射
使用USB线或无线局域网连接驱动器均可,若选择USB线,需将电脑与驱动器X1端口相连,然后开启电源,运行松下驱动器软件PANATERM进行连接配置。在湖北一家工厂里,小陈就是用USB线进行这一操作的。
驱动器接收的信号初始状态是开启的,但可以在调试阶段将其关闭,此时应将输入数值调整为零。在使用驱动器的输入输出接口前,需要先将编号进行对应。比如在湖南的一个项目里,调试阶段首先会关闭信号,然后才进行编号的对应工作。
驱动器输入输出映射需要包含PDO中的数据字典60FDh,通过DRIVE_IO指令来设定地址,同时要注意编号不能和其它设备相同。比如在江西的一个车间,就因为编号重复引发了冲突,后来经过调整才解决了问题。
在EtherCAT这条总线上,设备会根据连接的先后顺序自动分配编号。驱动器必须使用AXIS_ADDRESS指令来设定轴的编号,完成这一步后,才能通过BASE指令来操控电机。以福建的一个自动化项目为例,遵循这些步骤操作,电机便能顺利运行。
在使用过程中,大家是否遭遇过较为繁杂的连接或设置难题?欢迎在评论区交流心得,同时别忘了点赞及转发这篇文章。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请联系本站,一经查实,本站将立刻删除。如若转载,请注明出处:http://www.cfachydlyx.com/html/tiyuwenda/9796.html



